
 di Enzo Sorbera
di Enzo Sorbera
Uno dei progetti della sessione ancora in corso del laboratorio Arduino ha come obiettivo la costruzione di un robot. E’ un progetto che, dal punto di vista hardware, può essere realizzato con (relativa) facilità – un video guida pubblicato sul blog di Innovazione Locale è piuttosto eloquente – . La parte più difficile, come sempre, è quella relativa all’implementazione del software, se vogliamo far sì che il nostro robot sia “autonomo”, cioè non telecomandato.
Come si può facilmente immaginare, lo sviluppo di software per uno strumento di questo  genere ha dei costi proibitivi in termini di complessità e di tempi di realizzazione. Infatti, oltre a un sistema di gestione e controllo della mobilità, deve essere previsto anche un sistema di controllo e monitoraggio dell’ambiente in cui il nostro sistema si muove: evitare di urtare contro un ostacolo, cambiare direzione per non sbattere contro una parete, fermarsi per far passare il gatto, ecc.
genere ha dei costi proibitivi in termini di complessità e di tempi di realizzazione. Infatti, oltre a un sistema di gestione e controllo della mobilità, deve essere previsto anche un sistema di controllo e monitoraggio dell’ambiente in cui il nostro sistema si muove: evitare di urtare contro un ostacolo, cambiare direzione per non sbattere contro una parete, fermarsi per far passare il gatto, ecc.
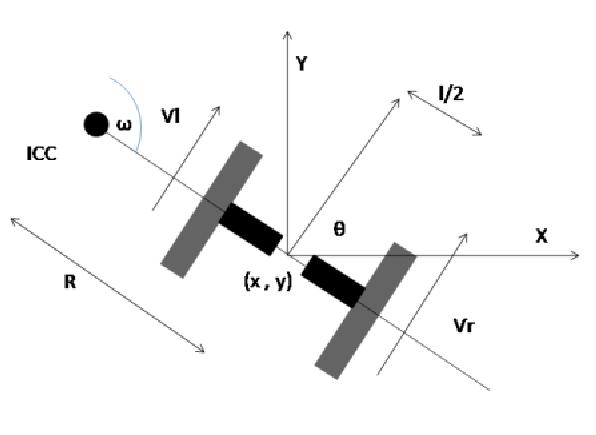
Un robot di questo tipo lo possiamo vedere come una macchina astratta, una sestupla che possiamo descrivere mediante le equazioni della cinematica. In pratica, con questo tipo di matematica possiamo studiare il movimento, astraendo dalle forze che riguardano il movimento. Ha a che fare principalmente con la geometria o, meglio, con le relazioni geometriche che governano il sistema. Di contro, dobbiamo però tener in conto la dinamica robotica, cioè lo studio del movimento in cui tutte le forze siano modellate. Sulle equazioni relative alla matematica richiamata cfr. http://www8.cs.umu.se/~thomash/reports/KinematicsEquationsForDifferentialDriveAndArticulatedSteeringUMINF-11.19.pdf
Per fare questo tipo di studio possiamo far ricorso a dei software di simulazione.
Coerentemente con le linee guida che ci siamo dati come gruppo, cioè che tutti gli strumenti che indichiamo o utilizziamo debbano essere open source e a costo contenutissimo, darò alcune indicazioni su ROS e su Gazebo. Il primo è un meta sistema operativo, un framework per la scrittura di software specifico per robot. Consiste di una collezione di librerie e strumenti specificamente rivolti alla robotica, dato che la finalità del gruppo che lo ha creato è quella del riuso, su scala mondiale, del software prodotto. Per maggiori informazioni, vedi http://wiki.ros.org/ROS/Introduction
E’ un sistema completamente supportato su Ubuntu e in fase di sperimentazione su Windows e OS X. Per chi avesse windows, la “furbata” è di installare il virtual box di Ubuntu (altro dirvi non vo’ ).
Cmq, la tappa obbligata per gli interessati è www.ros.org
Come si può immaginare, uno dei linguaggi di programmazione che si possono utilizzare in questo ambiente è Python.
 Gazebo è un simulatore di robot free e open source. E’ uno strumento capace di simulare una popolazione di robot in ambienti complessi sia interni che esterni, supporta una larga varietà di sensori e, oltre che offrirne di preimpostati, consente di creare propri robot. L’altra facilitazione è che possiamo far girare la nostra simulazione sui servizi cloud che offre la comunità. Possiamo installarlo come applicazione stand alone oppure come applicazione integrata in ROS. Lo troviamo su http://gazebosim.org/download
Gazebo è un simulatore di robot free e open source. E’ uno strumento capace di simulare una popolazione di robot in ambienti complessi sia interni che esterni, supporta una larga varietà di sensori e, oltre che offrirne di preimpostati, consente di creare propri robot. L’altra facilitazione è che possiamo far girare la nostra simulazione sui servizi cloud che offre la comunità. Possiamo installarlo come applicazione stand alone oppure come applicazione integrata in ROS. Lo troviamo su http://gazebosim.org/download
Trattandosi di un articolo (almeno in parte) divulgativo, non darò esempi, rinviando a prossimi articoli sul blog di Innovazione Locale.
Meno male che non hai chiamato: discutere di un modello di macchina astratta alle 6 di mattina mi avrebbe messo un po’ in crisi 🙂
Appena letto questo articolo che Enzo (Sorbera) ha mandato la mia reazione è stata quella di telefonargli: “sei sicuro? Non è che questo articolo più che incoraggiare potrebbe scoraggiare i potenziali interessati?”. È evidente che la sua lettura per il frequentatore non esperto di Chiusiblog risulta complessa e non tutto può essere compreso. Poi ci ho ripensato e l’ho pubblicato. Qui abbiamo spesso parlato del progetto di Laboratorio Ambente e di scienza di cittadinanza. Non è necessario che si conosca tutto, ma che comunque queste esperienze stanno andando avanti. Poi magari ci sarà qualche giovane che non capisce tutto quello che si sta facendo, ma ne intuisce l’importanza e si vuole aggregare. Allora perché no. In fondo il messaggio è semplice: ci sono strumenti importanti messi a disposizione di tutti in rete che consentono di arrivare a una progettazione di robot anche complessi attraverso attrezzature a basso costo e soprattutto con un software importante messo gratuitamente a disposizione.
Poi, come scrive Enzo, c’è un sito web locale aperto a chiunque. Chi si occupa o vorrebbe occuparsi di queste cose lo visiti e ci scriva. È un’avventura che è necessario fare insieme, dove ci si aiuta a vicenda.